
【導(dǎo)讀】目前無人機(jī)應(yīng)急電源大都采用及時(shí)維護(hù),提前一天充電的方法來保證其戰(zhàn)斗力,耗時(shí)長(zhǎng)。另外,人工維護(hù)偶爾造成的疏漏也不可避免,這些都是影響戰(zhàn)斗力發(fā)揮的嚴(yán)重隱患。所以給無人機(jī)快速充電成為一個(gè)很棘手的問題,那么如何給無人機(jī)快速充電?
無人機(jī)應(yīng)急電源指無人機(jī)飛行中主電源發(fā)生故障時(shí),為機(jī)載用電設(shè)備提供電能的供電電源。無人機(jī)應(yīng)急電源由20節(jié)鎳鎘電池單元組成。現(xiàn)代戰(zhàn)爭(zhēng)對(duì)武器裝備的要求空前嚴(yán)酷,具體到無人機(jī)系統(tǒng),則包括了大力縮短準(zhǔn)備時(shí)間,提高系統(tǒng)檢測(cè)精度,提高系統(tǒng)整體可靠性,增強(qiáng)系統(tǒng)采集情報(bào)信息的質(zhì)量等諸多方面。但是,目前無人機(jī)應(yīng)急電源大都采用及時(shí)維護(hù),提前一天充電的方法來保證其戰(zhàn)斗力,耗時(shí)長(zhǎng)。另外,人工維護(hù)偶爾造成的疏漏也不可避免,這些都是影響戰(zhàn)斗力發(fā)揮的嚴(yán)重隱患。
無人機(jī)應(yīng)急電源的充電特性
無人機(jī)應(yīng)急電源之所以要提前一天采用小電流充電是因?yàn)樗某浞烹娛且粋€(gè)復(fù)雜的電化學(xué)變化過程,為了保證壽命,只能犧牲充電的速度。影響充電過程的因素很多,如電解液濃度、極板活性物的活度、環(huán)境溫度都可以對(duì)充電速度產(chǎn)生影響。這使得簡(jiǎn)單控制系統(tǒng)對(duì)提高充電效率無法起到顯著作用。無人機(jī)應(yīng)急電源的最佳充電電壓在整個(gè)充電過程中是時(shí)間的變指數(shù)函數(shù),在不同階段將呈現(xiàn)不同的變化規(guī)律。充電特性曲線如圖1所示。
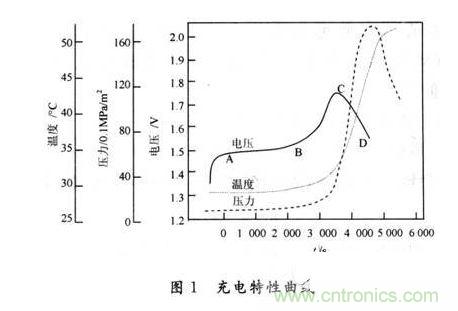
從圖1中可以看出,無人機(jī)應(yīng)急電源的充電過程可分為A-B段、B-C段、C-D段。其中A-B段是充電的初始階段,電量基本用完,這一階段可采用恒定小電流充電;B-C段是電壓變化最為劇烈的一段,如果采用恒流充電,電流大,易損壞電池,電流小,不能充分發(fā)掘時(shí)間;C-D段的電壓從最高點(diǎn)開始下降,可采用涓流充電。
獨(dú)特性
無人機(jī)應(yīng)急電源依據(jù)其具體不同的使用狀況,其充電電流有很大的不同,即使同一套無人機(jī)系統(tǒng)同時(shí)配發(fā)相同容量、相同型號(hào)的電源也不例外。裝備現(xiàn)用的充電技術(shù)沒有考慮充電過程的非線性變化,無法實(shí)現(xiàn)對(duì)無人機(jī)應(yīng)急電源的適應(yīng)性充電,只能以相對(duì)較小的電流實(shí)施充電,從而導(dǎo)致充電速度慢,而且充電后期析氣嚴(yán)重,對(duì)電源內(nèi)部造成損壞,不僅不能快速充電,還大大縮短了電源的使用壽命,必須加以改善。經(jīng)綜合比較,可選用成本較低,且適應(yīng)性較強(qiáng)的模糊控制策略。
模糊控制充電器的設(shè)計(jì)
模糊控制不需要掌握被控對(duì)象的數(shù)學(xué)模型,特別適合這種非線性控制。它對(duì)過程參數(shù)的變化具有較強(qiáng)的適應(yīng)性,并且可加入一些人為的經(jīng)驗(yàn)因數(shù),使控制過程更易于按照人的要求來實(shí)現(xiàn)??梢灶A(yù)期這種模糊控制充電器的工作原理是預(yù)先設(shè)計(jì)一張控制策略表存入單片機(jī)的ROM中??刂茣r(shí)根據(jù)采樣結(jié)果計(jì)算輸入量的值,然后通過量化因子將其模糊化,以得到其論域。再查表得到相應(yīng)的控制量。將該控制量與比例因子相乘,即可作為輸出量,對(duì)充電過程實(shí)施控制。
輸入和輸出量的確定
模糊控制器輸入量的選擇對(duì)系統(tǒng)性能的影響很大,電源溫度、電源端電壓以及充電電流都可作為輸入量,但是這些方法的工程實(shí)現(xiàn)難度大且效果差。根據(jù)圖1,B-C段是電壓變化最為劇烈的一段,并且持續(xù)時(shí)間較長(zhǎng),可將這一段電壓的變化率△U/△t作為模糊控制的輸入量,再輔以電源實(shí)時(shí)電壓與可充最高電壓之間的差值△E,便可實(shí)現(xiàn)較完美的控制。輸出量則以PWM波的占空比增量△ton調(diào)節(jié)的充電電流作為標(biāo)準(zhǔn)。
微處理機(jī)模塊
圖 中模糊化、模糊決策以及解模糊環(huán)節(jié)都是在微處理機(jī)模塊中完成的。在此選用Motorola公司的單片機(jī)MC68HC05SR3,其內(nèi)部資源豐富,ROM 和RAM空間較大,便于實(shí)施模糊控制。另外,它還帶有4個(gè)A/D轉(zhuǎn)換器,十分便于對(duì)模擬量的檢測(cè)。由該單片機(jī)與相應(yīng)的接口電路配合,構(gòu)成系統(tǒng)的控制核心。
負(fù)反饋電路
電壓電流檢測(cè)電路是通過A/D轉(zhuǎn)換器檢測(cè)系統(tǒng)充電電流的;電池端電壓、電池溫度等參數(shù)是通過采樣電路、熱敏電阻等形成負(fù)反饋回路參與控制的。
充電電流輸出電路
首先,變流電路通過脈寬調(diào)制方式把交流市電轉(zhuǎn)換為所需的直流電壓,然后根據(jù)負(fù)反饋電路檢測(cè)系統(tǒng)得到的充電電壓、電流,經(jīng)微處理機(jī)模塊計(jì)算出最佳變化量,將此變化量加到充電電路中,經(jīng)PWM輸出,便得到所需的最佳充電電流。
通過對(duì)無人機(jī)應(yīng)急電源端電壓變化率的監(jiān)測(cè)得到了模糊控制所依據(jù)的最佳充電電壓曲線,以此曲線為輸入量設(shè)計(jì)了模糊控制策略表,并實(shí)現(xiàn)智能跟蹤模糊控制。通過與傳統(tǒng)充電方法對(duì)比證實(shí),這種基于模糊控制的無人機(jī)應(yīng)急電源快速充電方法具有以下優(yōu)點(diǎn):充電速度大大加快、電池溫升低,充電按照最佳曲線不損壞電源等??梢姡捎迷摷夹g(shù)可以實(shí)現(xiàn)無人機(jī)應(yīng)急電源充電過程的快速化和智能化,對(duì)無人機(jī)武器系統(tǒng)作戰(zhàn)能力的穩(wěn)定發(fā)揮具有重大意義。



